
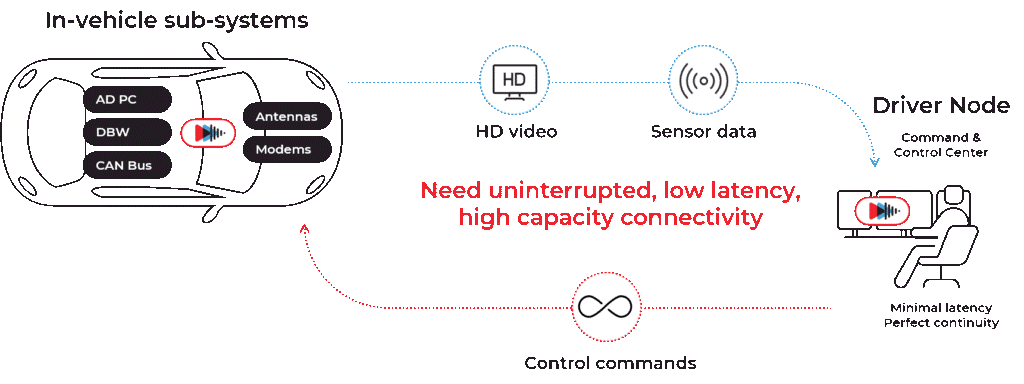
Teleoperation is the technical term for the operation of an unmanned machine, system, or robot from a distance. In AV teleoperations, remote operators sit in a control center, either fully driving a vehicle (“direct driving”), serving as a remote safety driver, or ready to assist when an AV requires guidance to handle a specific challenge – or a situation in which the level of confidence of the AV as to what needs to be done in a particular circumstance – is insufficient (also known as “high level commands”).
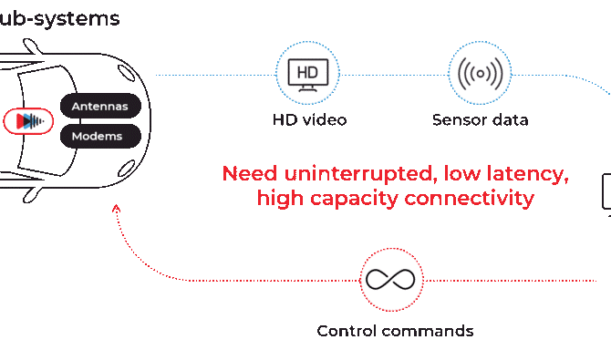
In order to determine the state of the world around the vehicle to support the decision to be made, the remote operator needs to “see” through the “eyes” of the vehicle. This means that video and other data captured by cameras and sensors on the vehicle need to travel between the vehicle and the remote operator.
Specifically, teleoperation relies on sensor data, high quality video, and audio. The most important and sensitive data stream is video – real time, accurate, and continuous video is paramount to remote driving, and it hinges on the availability of a constant, robust connection between the moving vehicle and the remote operator at the command center.
The main challenges of the remote vehicle operation are:
- Latency
- Bandwidth (BW)
- Communication Reliability
All three factors are interconnected. Higher sensor bandwidth will lead to a higher bandwidth and packet drop ratio in the network, resulting in frame loss and retransmissions, thus increasing latency.
One of the solutions to communication medium reliability is the transmission of redundancy packets using FEC algorithms, but this practice leads to additional BW overhead, and as a result to a increased latency as well. Since the human operators require a certain video resolution (use case specific), it is not possible to lower the BW below the minimum required video BW, therefore, the network medium characteristics dictate the lowest achievable latency.
Both latency and bandwidth are being addressed by 5G (and 6G) technologies and infrastructure. One of the modes of operation of 5G is the Ultra-Reliable Low-Latency Communication (URLLC). Using URLLC applications are promised a guaranteed latency down to 2ms (data transmission). It is still unclear how much resources URLLC will require (cost) and the availability of such resources for autonomous AV region wide operation.
In high congestion areas, where multiple AVs require simultaneous operation, such URLLC resources may be available only for one or few of the AVs in this area and others may be forced to utilize lower latency communication means. Another additional concern for basing Teleoperation solutions on URLLC 5G infrastructure, is the limited deployment of 5G systems. For example, today, the LTE technology deployment in UK is 91%, Germany 93%, US is 97% (source).
Cellular operators coverage commitments typically refer to guaranteeing downlink speed above certain signal level within the coverage area. However, the signal level does not promise 100% downlink availability, and most importantly for Teleoperation service, does not guarantee uplink speeds.
In 2025, it is expected to start seeing some regional 5G penetration and coverage especially in high demand areas, but no ubiquitous coverage across countries.
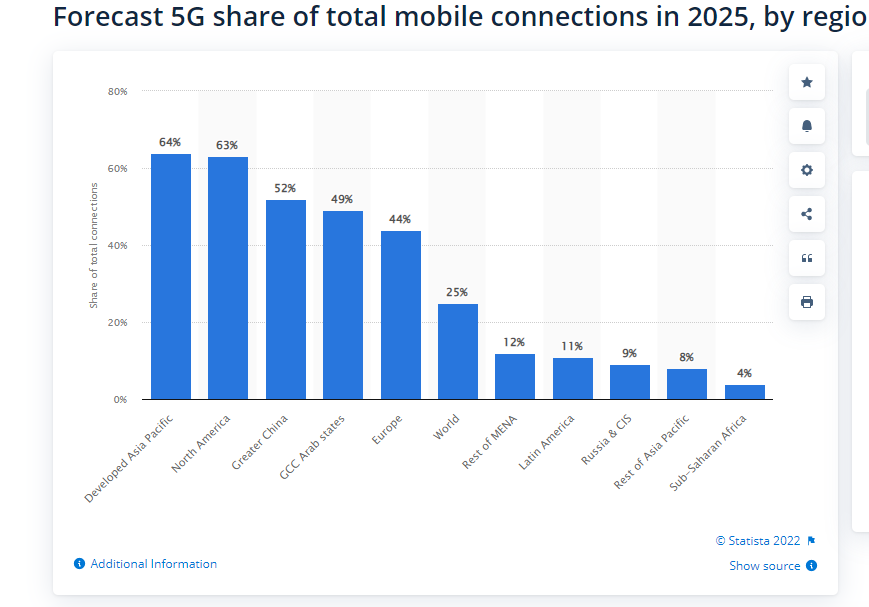
As it can be seen, the coverage in 2025 may be enough to support the higher BW required by entire countries population, but the 5G/URLLC deployment priority will most likely be focused on the high demand high user density city centers.